Активная безопасность, составляющая конструктивной безопасности автомобиля, является комплексным эксплутационным свойством, непосредственно связанным с эффективным использованием ТС по назначению - перевозке грузов и пассажиров. Преимущества перевозок автотранспортом: сокращение времени доставки - требует возможности движения ТС большой грузоподъемности (пассажировместимости) с высокой скоростью; возможности осуществления периодических остановок и маневрирования; движение в любое время суток.
Активную безопасность АТС определяют: информационная обеспеченность, тормозные свойства, тягово-скоростные свойства, управляемость, устойчивость.
Косвенное влияние на активную безопасность оказывают: надежность и эргономичность автомобиля, параметры дороги, с которыми должны согласовываться компоновочные, весовые и другие параметры автомобиля.
Эксплуатационные свойства, характеризующие возможность эффективного использования конструкции ТС и его систем: двигателя, тормозного управления, рулевого управления, колес и шин, подробно изучаются в курсе «Теория автомобиля и автомобильного двигателя», грузоподъемность и пассажировместимость - в курсах «Грузовые автомобильные перевозки» и «Пассажирские автомобильные перевозки», кабины и оборудование рабочего места водителя - в курсе «Безопасность жизнедеятельности». Ниже рассматриваются параметры конструкции автомобиля - габариты, масса, а также тяговая динамичность автомобиля, формирующиеся потребностями общества в эффективной провозке пассажиров и
грузов. Эти параметры являются условием и основой дифференцированных требований активной безопасности для отдельных групп АТС (категорий).
Габариты автомобиля - наибольшие размеры внешних очертаний ТС. Это - длина Za, ширина Bа, высота На. Габариты автомобиля, а также база L и масса Ма автомобилей определяют физические характеристики транспортного потока и имеют большое значение для безопасности движения. Требования, ограничивающие размеры и массу ТС, во всех странах устанавливаются в законодательном порядке.
При движении автомобиль подвергается воздействию случайных возмущений, стремящихся изменить характер движения. К таким возмущениям относятся удары колес о неровности покрытия, изменение поперечного уклона дороги, боковой ветер, случайный поворот передних колес и т. п. Вследствие этого даже на строго прямолинейных участках дороги автомобиль находится под углом к оси дороги, и размер полосы, потребной для его движения - динамический коридор, превышает его габаритную ширину.
Ширина динамического коридора зависит от габаритных размеров автомобиля и его скорости. На рис. 2.1 приведены экспериментальные зависимости поперечного смещения центра тяжести автомобилей ус от их скорости и.
Из графиков следует, что, чем меньше ширина полосы движения на дороге и чем больше габаритные размеры ТС, тем ниже должна быть скорость движения.
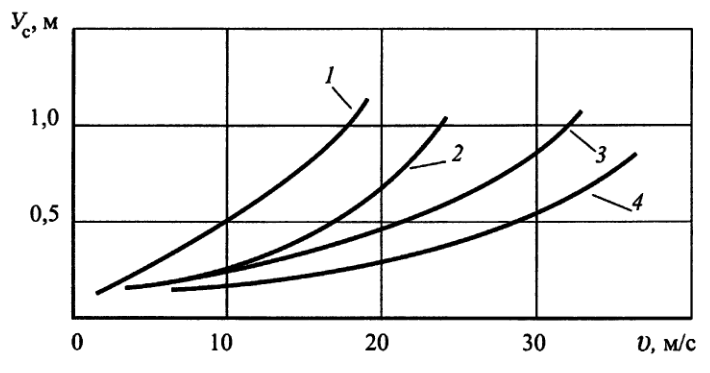
Рис. 2.1. Поперечное смещение центра тяжести автомобилей в зависимости от скорости:
1 - ЗИЛ 43141; 2 - ГАЗ 3309; 3 - ГАЗ 3110; 4- ВАЗ 2110
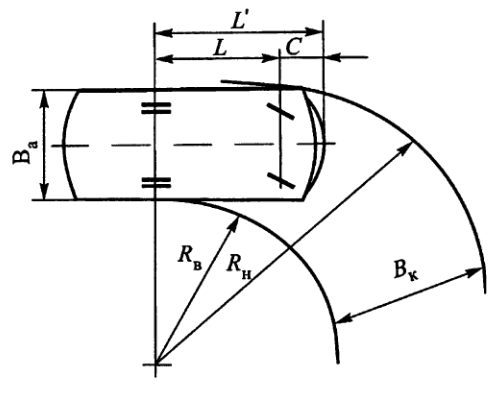
Рис. 2.2. Динамический коридор при повороте автомобиля
Для автопоездов ширина динамического корридора с увеличением скорости возрастает быстрее, чем для одиночного автомобиля, вследствие угловых колебаний («виляния») прицепов или полуприцепов в горизонтальной плоскости. При определенной скорости «виляния» прицепа становятся настолько большими, что водитель не может устранить их поворотом рулевого колеса и должен снизить скорость.
Поэтому в конструкции силовой установки тягачей предусмотрены устройства, ограничивающие скорость движения.
В расчетах ширину динамического коридора ТС рекомендуется принимать: легковые автомобили 2,8-3,1 м; среднетоннажные грузовые автомобили, автобусы и троллейбусы 3,5-4,3 м; крупногабаритные грузовые автомобили, автобусы большой вместимости и автопоезда 3,7-4,5 м. Минимальные значения характеризуют ширину коридора при скоростях до 11 м/с, максимальные значения - при скоростях до 30 м/с.
Более весомо влияние геометрических параметров АТС при криволинейном движении. Хотя при крутых поворотах скорости автомобиля обычно невелики и случайные возмущения незначительны, ширина динамического коридора может быть достаточно большой, рис. 2.2.
Ширину динамического коридора при повороте можно определить по формулам:
для одиночного автомобиля
 (2.2)
(2.2)
где
Rн и Rв - соответственно наружный и внутренний габаритные радиусы поворота автомобиля;
L' = L + С - расстояние от заднего моста до передней части автомобиля (L - база автомобиля, С - передний свес); для автопоезда
 (2.3)
(2.3)
где
R0 - радиус кривизны круговой траектории, по которой движется середина заднего моста тягача;
Bа,L и С-соответственно, габаритные ширина, база и передний свес тягача;
Ск - сдвиг заднего моста прицепа относительно моста тягача.
При движении автомобиля, когда его передние колеса повернуты на максимальный угол, ширина динамического коридора примерно в 1,5 раза больше его габаритной ширины, а у городских автобусов категории М3 примерно в 2 раза.
ГОСТ Р 41.36-99 (Правила №36 ЕЭК ООН) регламентирует маневренность автобусов вместимостью более 22 пассажиров. При движении ТС на повороте вправо или влево оно должно полностью вписываться по наиболее выступающей точке в круг радиусом поворота 12,5 м. Если наиболее выступающие точки ТС находятся в пределах круга поворота с радиусом 12,5 м, то в таком случае ТС должно вписываться на повороте вправо или влево в полосу движения R„ - RB = 7,2 м, рис. 2.3. Максимальный вылет крайней точки U при повороте указывается на задней части кузова автобуса.
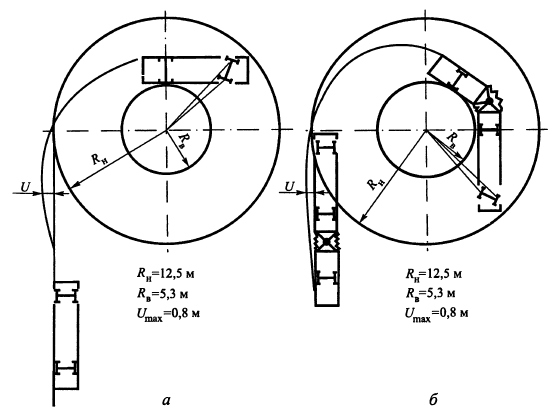
Рис. 2.3. Схема маневренности автобуса: а - жесткое ТС; б - сочлененное ТС
Ширина динамического коридора автопоезда зависит от числа прицепных звеньев, их базы и длины дышла, поэтому значительно больше, чем у одиночного автомобиля с той же габаритной шириной. Так, например, для грузового автомобиля с прицепом при = 6 м и С, = 1 м максимальная ширина коридора может достигать 6 м, т. е. более, чем вдвое превосходит габаритную ширину тягача. Большая ширина полосы движения, занимаемой автопоездами, наряду с их неудовлетворительной динамичностью является одной из причин обозначения автопоездов по требованиям безопасности специальными опознавательными знаками: спереди - «Автопоезд», сзади - «Длинномерное транспортное средство».
Для улучшения маневренности и уменьшения ширины динамического коридора в составе автопоездов применяют прицепы с управляемыми передними колесами, в ходовой части автобусов особо большой вместимости устанавливают заднюю подруливающую ось.
Габаритная высота Н„ имеет значение при проезде автомобилей под путепроводами и проводами контактной сети. ТС (например, двухэтажные троллейбусы или автобусы, полуприцепы- панелевозы или автомобили-фургоны) с высоко расположенным центром тяжести испытывают значительные угловые колебания в поперечной плоскости. При движении по неровной дороге они могут верхним углом задеть за,столб или мачту. Максимально допустимая габаритная высота ТС составляет 3,8 м.
Габариты ТС (длина, ширина и высота) и минимальный радиус поворота указываются изготовителем в Руководстве по эксплуатации ТС.
Масса автомобиля. Массовая характеристика ТС включает в себя массу автомобиля в снаряженном состоянии, его полную массу, сухую и максимальную.
Снаряженная (собственная) масса - это масса полностью заправленного автомобиля с запасным колесом, инструментом и водителем.
Полная масса - включает в себя снаряженную массу и расчетную номинальную массу груза или пассажиров, установленную предприятием-изготовителем в качестве максимально допустимой.
Сухая масса - это масса незаправленного автомобиля без инструмента и запасного колеса.
Максимальная масса представляет собой сумму нагрузок на оси ТС, ограничивается предельно допустимой нагрузкой на ось и не должна превышать разрешенную нагрузку на ось для дорог определенной категории.
Масса ТС кроме непосредственного влияния на активную безопасность ТС, также косвенно воздействует на техническое состояние дорожного покрытия. Многократное динамическое воздействие ТС на дорогу приводит к накоплению пластических деформаций в дорожной одежде, нарушению внутренних связей между ее слоями и, как следствие, к снижению сроков службы покрытия. Покрытие длительное время выдерживает движение автомобилей, не разрушаясь, только в том случае, если оно рассчитано с учетом величины возможных нагрузок и частоты их приложения.
Во всех, странах строго соблюдают ограничение осевых нагрузок и полных масс ТС. По дорогам с усовершенствованным капитальным покрытием могут двигаться ТС с предельной осевой нагрузкой 100 кН, а при двух спаренных мостах - 180 кН. На дорогах любых типов, соответственно, 60 кН и 110 кН. Максимальная масса и нагрузка на оси обязательно указывается изготовителем в Руководстве по эксплуатации ТС и вносится в регистрационные документы.
Тяговая динамичность - свойство автомобиля, характеризующее связь между силами, движущими автомобиль, и силами сопротивления движению. Тяговая динамичность автомобиля определяет его производительность и уровень затрат на перевозки. Чем динамичнее автомобиль, тем выше его средняя скорость. Однако, необходимо, чтобы скорость в любой момент точно соответствовала дорожным условиям и психофизиологическим возможностям водителя. Поэтому правилами дорожного движения вводится ограничение как максимальной скорости для всех ТС, так и отдельных категорий автомобилей.
При оценке активной безопасности ТС в движении рассматривают следующие показатели тяговой динамичности: максимальную скорость итя„ и ускорение j^, минимальные время tp и путь разгона Sv на горизонтальной дороге с твердым покрытием хорошего качества при прямолинейном движении автомобиля. Особенности же криволинейного движения исследуют при изучении устойчивости и управляемости автомобиля.
Силы и моменты, действующие в общем случае на автомобиль, который разгоняется, показаны на рис. 2.4.рис. 2.4. Силы, действующие на автомобиль при разгоне
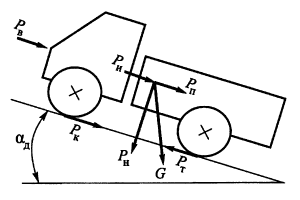
Рис. 2.4. Силы, действующие на автомобиль при разгоне
Из теории автомобиля известно уравнение движения автомобиля, связывающее эти силы:
 (2.4)
(2.4)
где
РТ - сила тяги на ведущих колесах автомобиля;
РИ - приведенная сила инерции автомобиля;
РД = РК + РП - сила сопротивления дороги (РК - сила сопротивления качению, РП - сила сопротивления подъему);
РВ - сила сопротивления воздуха.
Сила тяги РТ представляет собой отношение момента МТ на полуосях к радиусу r ведущих колес при равномерном движении автомобиля
 (2.5)
(2.5)
где
Ме - эффективный крутящий момент двигателя, Н м;
uтр - передаточное число трансмиссии;
ηтр - КПД трансмиссии.
Величины r приведены в технических характеристиках шин. При их отсутствии величину r рекомендуется определять по приближенному соотношению:

где
D0- диаметр обода колеса, м;
Вш - высота профиля шины, м;
λш - коэффициент радиальной деформации шины, равный 0,10-0,16 для стандартных и широкопрофильных шин.
Силу сопротивления дороги Рд определяют по формуле:
 (2.6)
(2.6)
где
Ма - масса автомобиля, кг;
g - ускорение свободного падения, м/с2;
f - коэффициент сопротивления качению;
 - коэффициент сопротивления дороги Ѱд,
- коэффициент сопротивления дороги Ѱд,
где
αд - угол продольного уклона дороги. На подъемах угол αд считают положительным, на спусках - отрицательным. На дорогах с твердым покрытием угол αд не превышает 4-5°, и без большой ошибки можно написать:

При приближенных расчетах коэффициент f часто считают постоянным, равным его среднему значению. На дорогах с асфальтовым и цементобетонным покрытием, находящемся в отличном состоянии, f = 0,012-0,018, а в удовлетворительном состоянии f = 0,018-0,020.
Силой сопротивления воздуха Рв называют равнодействующую элементарных сил, распределенных по всей поверхности автомобиля. Точку приложения этой силы называют метацентром автомобиля. Сила сопротивления воздуха может быть определена по формуле
 (2.7)
(2.7)
где
КВ - коэффициент сопротивления воздуха (коэффициент обтекаемости), зависящий от формы и качества отделки поверхности автомобиля, Н с2;
FB - лобовая площадь автомобиля, м2;
WB - фактор обтекаемости, Н с2/м2.
Коэффициент КВ численно равен силе сопротивления воздуха, создаваемой 1 м2 лобовой площади автомобиля при движении со скоростью 1 м/с2. Лобовой площадью FВ автомобиля называют площадь его проекции на плоскость, перпендикулярную к продольной оси автомобиля. Средние значения лобовой площади и коэффициентов обтекаемости приводятся в технической литературе.
Приведенная сила инерции РИ учитывает инерцию поступательно движущихся и вращающихся масс автомобиля:
 (2.8)
(2.8)
где
Ма - масса автомобиля, кг;
j - ускорение автомобиля, м/с2;
δвр - коэффициент учета вращающихся масс, равный
JТ - момент инерции маховика и связанных с ним деталей двигателя и сцепления, кг м2;
JК - суммарный момент инерции всех колес автомобиля, кг м2.
Энергия, затрачиваемая на разгон вращающихся деталей двигателя, на прямой передаче в 2 - 3 раза, а на низших передачах - в 8 - 10 раз больше энергии, расходуемой на разгон колес.
Максимальные скорость и ускорение автомобиля можно определять двумя способами: аналитическим и графоаналитическим, в основу которых положено уравнение тягового баланса.
Преобразовав уравнение (2.4) относительно искомых величин в выражение вида

и, учитывая, что при максимальной скорости ускорение j = 0, получим расчетные зависимости для скорости и ускорения:

и

где Ас, Вс, Сс и Dc - коэффициенты, значения которых зависят от максимальной мощности автомобиля, соответствующей угловой скорости коленчатого вала, конструкции двигателя, КПД трансмиссии, приведенной массы автомобиля, коэффициента сопротивления дороги.
При графоаналитических расчетах в координатах Р и v строят кривую силы тяги при движении на высшей передаче, рис. 2.5, а. В нижней части наносят кривую силы сопротивления дороги РД, и вверх от нее откладывают значения силы сопротивления воздуха РВ. Для построения графиков используют три - четыре расчетные точки.
Кривая суммарного сопротивления РД + РВ определяет силу тяги, необходимую для движения автомобиля по данной дороге с v = const. Если кривая силы тяги РТ проходит выше кривой РД + РВ, то отрезки Р3, заключенные между этими кривыми, представляют собой нереализованную часть (запас) силы тяги.
Запас силы тяги можно использовать для преодоления повышенного сопротивления дороги (увеличение f или αд) или для разгона автомобиля. Максимальную скорость v max находят по абсциссе точки пересечения кривых РТ и РД + РВ, так как при этом запас силы тяги, а следовательно, и ускорение равны нулю.
При графоаналитическом определении jmах задаются несколькими значениями скорости и рассчитывают величины ускорения при работе двигателя с полной нагрузкой. Построив по точкам в координатах осях v - j кривую ускорений, проводят касательную к ней, параллельную оси v, как показано на рис. 2.5, б. .Ордината точки касания определяет величину ускорения, максимально возможного на данной дороге.
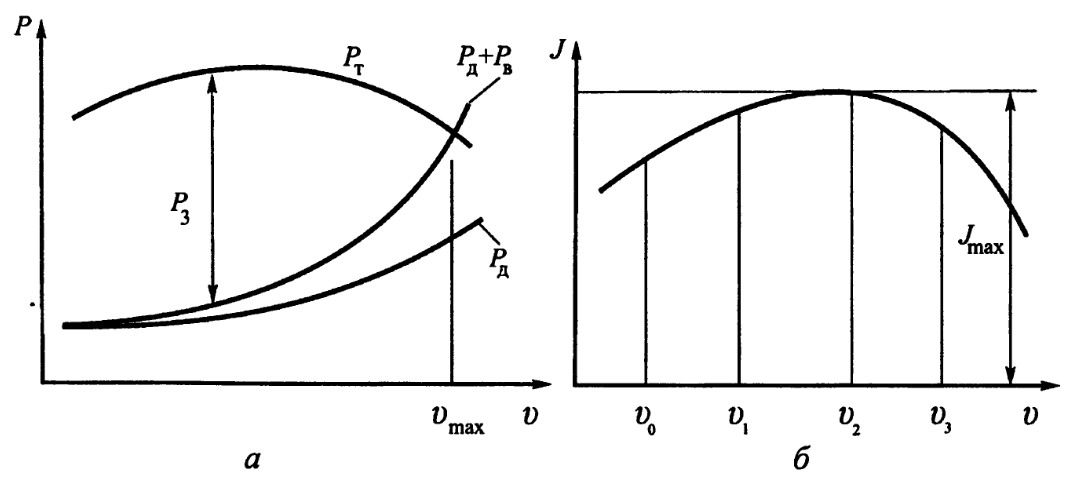
. 2.5. Схемы графоаналитических способов определения v max (а) и jmах (б)
Максимальная скорость автомобиля является показателем его предельных возможностей. В практике дорожного движения эту скорость автомобили развивают довольно редко. Водители стремятся вести автомобиль со скоростью несколько меньшей, чем максимально возможная. Это, с одной стороны, объясняется напряженным режимом работы агрегатов автомобиля, возникновением неприятных вибраций и шума, перегревом двигателя. С другой стороны, водитель, управляя быстро движущимся автомобилем, испытывает большую психофизиологическую нагрузку, так как при этом резко возрастает объем воспринимаемой и перерабатываемой им информации, увеличивается число рабочих движений. Кроме того, дорожные условия редко сохраняются постоянными на большом протяжении автомагистрали, что вынуждает водителя корректировать скорость движения автомобиля.
При разгоне с максимальным ускорением возникают большие инерционные нагрузки, неприятно действующие на пассажиров и водителя. Поэтому в обычных условиях движения ускорение не превышает (0,5—0,8) jmах, достигая предельных значений лишь в особых случаях: например, при динамическом преодолении крутого подъема, в процессе обгона или при выходе из сложной дорожной ситуации путем обгона.
Обгон представляет собой сложный и опасный маневр, связанный с выездом на соседнюю полосу движения с высокой скоростью и требующий свободного пространства перед обгоняющим автомобилем.
Чем больше скорость и выше плотность транспортного потока, тем больше вероятность ДТП при обгоне и выше степень тяжести ДТП. Так, при скорости транспортного потока около 11 м/с количество аварий при обгоне, при которых люди получают травмы, составляет 14 %. При скорости потока, равной 33 м/с, количество таких аварии возросло до 65 %.
Обгон может совершаться с постоянной и с возрастающей скоростью. Несмотря на то, что требования безопасности во втором случае выше, основные этапы обгона одинаковы, и могут быть рассмотрены на одном примере, рис. 2.6.
Обгон с постоянной скоростью характерен для свободного, нестесненного движения автомобиля в загородных условиях. Тогда водитель обгоняющего автомобиля имеет впереди себя достаточное пространство для предварительного разгона до большей скорости v1,. Эта скорость должна быть больше скорости v 2 обгоняемого автомобиля.
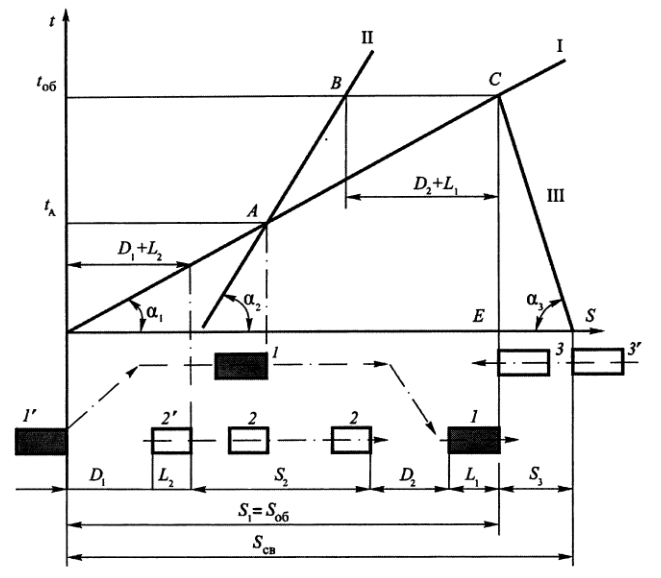
Рис. 2.6. Схема и график обгона
Путь обгона So6 и время обгона tо6, необходимые в этом случае для безопасного обгона, определяют по формулам:
 (2.9)
(2.9)
где
D1 и D2 — дистанции безопасности между обгоняющим и обгоняемым автомобилями в начале и конце обгона, м;
L1 и L2 — габаритные длины автомобилей, м;
v1, и v2 — скорости обгоняющего и обгоняемого автомобилей, м/с.
Первая дистанция безопасности может быть представлена в виде функции скорости обгоняющего автомобиля
и вторая - в виде функции скорости обгоняемого автомобиля
где
аоб и bоб - эмпирические коэффициенты, зависящие от типа обгоняемого автомобиля (табл. 2.1).
Таблица 2.1. Значения коэффициентов ао6 и bо6
|
Автомобили |
аоб |
bоб |
|
Легковой |
0,33 |
0,26 |
|
Грузовой средней грузоподъемности |
0,53 |
0,48 |
|
Грузовой большой грузоподъемности, автобус и автопоезд |
0,75 |
0,67 |
Зная путь обгона S0б и скорость встречного автомобиля v3, можно определить минимальное расстояние Sсв, которое должно быть свободным перед обгоняющим автомобилем в начале обгона:
 (2.10)
(2.10)
Положения обгоняющего, обгоняемого и встречного автомобилей в начальный момент времени отмечены в нижней части схемы соответственно цифрами 1', 2' и 3'. Движение всех трех автомобилей считаем равномерным, и соответствующие зависимости S = S (t) представляют собой прямые линии I, II и III. Котангенсы углов α1 α2 и α3 наклона этих прямых пропорциональны скоростям v1, v2 и v3 автомобилей.
В начале обгона расстояние между передними частями обгоняющего и обгоняемого автомобилей равно D1 + L2. Точка А пересечения прямых I и II характеризует момент обгона, в который оба автомобиля поравнялись (время после чего обгоняющий автомобиль начинает выходить вперед. Находим на графике две точки С и В на линиях I и II, расстояние между которыми по горизонтали было бы равно сумме D2 + L1 . Тогда абсцисса точки С определит путь обгона, а ордината - время обгона.
Путь и время, необходимые для безопасного обгона, резко возрастают при увеличении скорости обгоняемого автомобиля. При v1 = 30 м/с, v2 = v3 = 10 м/с, L1 = L2 = 5 м для безопасного обгона необходимы расстояние примерно 500 м и время около 17 с. При повышении скорости v2 до 20 м/с путь обгона возрастает до 1260 м, а время до 95 с. Таким образом, если водитель обгоняемого автомобиля повысит скорость, не желая уступить дорогу, это резко увеличит время и путь обгона, и может привести к аварии. Поэтому правила дорожного движения запрещают водителю обгоняемого автомобиля препятствовать завершению обгона.
Обгоны с постоянной скоростью возможны на дорогах с проезжей частью шириной более 7-8 м и интенсивностью движения в обоих направлениях менее 40-60 автомобилей в час, т. е. с интервалом движения около 1 мин. Значительно сложнее и опаснее обгонять при большей интенсивности движения. Так, если интенсивность превышает 150-160 автомобилей в час, то они движутся сплошным потоком. В этих условиях быстроходный автомобиль, догнав медленно движущийся автомобиль, уменьшает скорость и некоторое время движется позади него с той же скоростью. При появлении перед обгоняемым автомобилем достаточного свободного расстояния водитель начинает обгон, сочетая его с разгоном.
Результаты расчетов времени и пути обгона для ВАЗ 2101 показали, что при скорости обгоняемого автомобиля 10-12 м/с и при отсутствии встречных автомобилей необходимо свободное расстояние не менее 250-300 м. Если автомобиль будет двигаться по левой стороне дороги, где возможно появление встречных транспортных средств, то безопасное расстояние увеличивается от 450 до 500 м. Согласно СНиП при движении автомобиля с расчетной скоростью 33,3 м/с расстояние видимости поверхности дороги должно быть не менее 175 м, а расстояние видимости встречного автомобиля не менее 350 м.
Эти данные показывают, что даже на дорогах высших категорий обгон, сочетаемый с разгоном, практически трудно осуществим даже при относительно небольшой скорости обгоняемого автомобиля, так как гарантированные расстояния видимости меньше безопасных путей обгона. На дорогах же низших категорий, имеющих небольшую ширину проезжей части, где выезд автомобилей на левую сторону наиболее вероятен, нормируемые расстояния видимости допускают обгоны лишь весьма тихоходных транспортных средств, движущихся со скоростью 7-8 м/с. При недостаточных расстояниях видимости водители вынуждены сокращать дистанции безопасности в начале и, в особенности, в конце обгона, что часто приводит к нарушению требований безопасности. Чрезмерное приближение к переднему автомобилю может быть причиной аварии в случае неожиданного его торможения. Уменьшение второй дистанции безопасности и «срезание угла», иногда практикуемое водителями в конце обгона, также опасны, так как при ошибке в расчете происходит столкновение автомобилей.
В случае обгона, сочетаемого с разгоном, большое значение имеет приемистость автомобиля. Чем больше максимальное ускорение автомобиля, тем быстрее будет закончен обгон. Так, если принять D1 = D2 = 30 м и L1 = L2 = 5 м, то при j = 0,2 м/с2 для обгона автомобиля, двигающегося со скоростью 10 м/с, необходимы время не менее 27 с и расстояние около 335 м. При увеличении ускорения до 0,4 м/с2 время обгона уменьшается до 19 с, а путь обгона - до 260 м.
Наиболее безопасен обгон легковым автомобилем тихоходного транспортного средства, например грузового автомобиля. Напротив, обгоны легковых автомобилей, предпринимаемые водителями грузовых автомобилей и даже автопоездов, весьма опасны и нередко заканчиваются трагически. Для снижения вероятности ДТП наиболее часто вводят запрещения обгонов для грузовых автомобилей.